Bau eines 12V-Rotors mit Fernsteuerung
und
digitaler Richtungsanzeige
Der
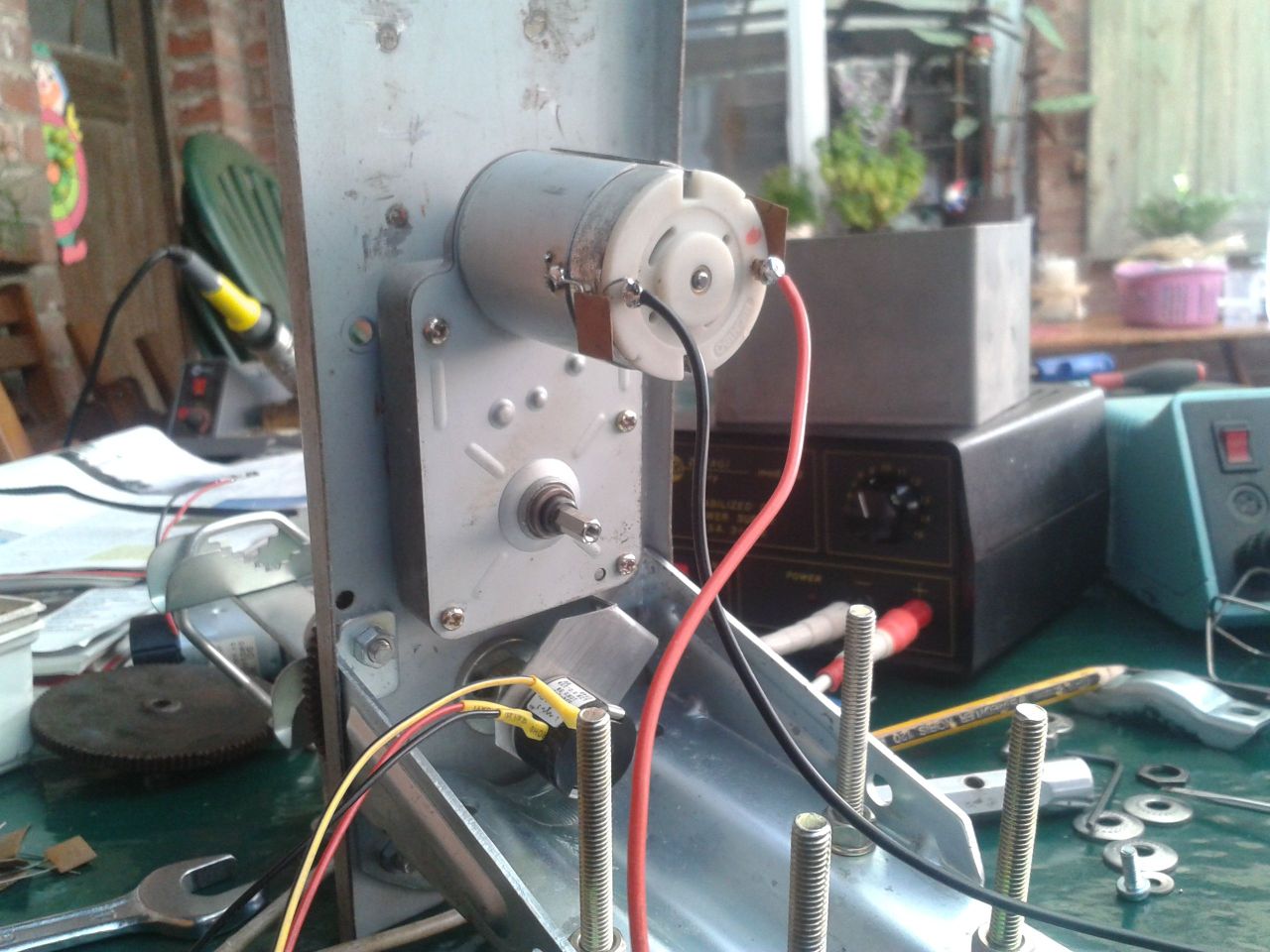
Getriebe-Motor
ist von Pollin, das Mastpoti
hat 10 Umdrehungen und 10k

Die
Zahnräder haben eine 3:1 Untersetzung
Die Mastwelle ist eine M10 Schraube , sie hat im Kopf
eine 6,3mm Bohrung für das Mastpoti mit einer
seitlichen Madenschraube zum fixieren.

So ist
dann der Mast befestigt: abgewinkeltes Flacheisen
mit 10mm Loch für die M10-ner Schraube,
an der Senkrechten dann die Mastschellen

Die 6
polige Mike-Buchse
dient dem Anschluß des Steuerkabels.
2 Adern für den Motor und 3 Adern für das Mastpoti.
Das Kabel sollte natürlich geschirmt sein!

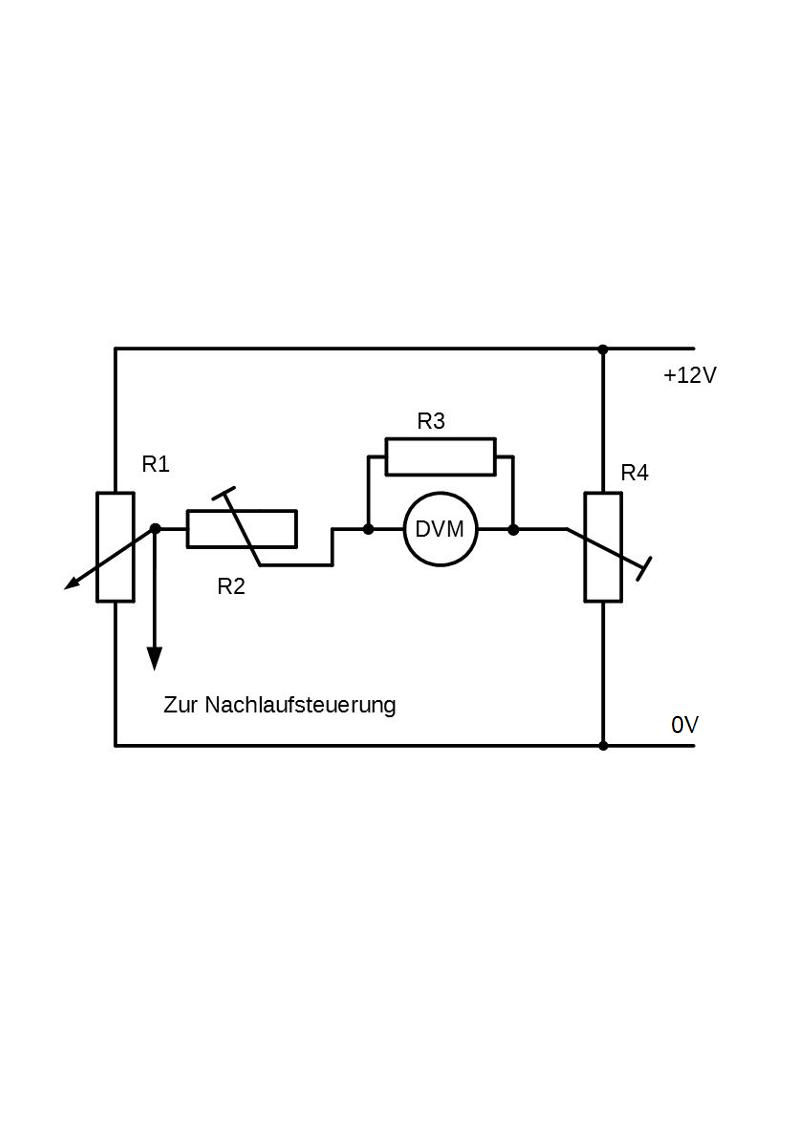
Anzeige
und Richtungswahl, das Poti ist das selbe wie am Mast,
die Digitalanzeige ist ein Panel-Meter PM435
Vorteil: keine galvanisch getrennte Betriebsspannung notwendig
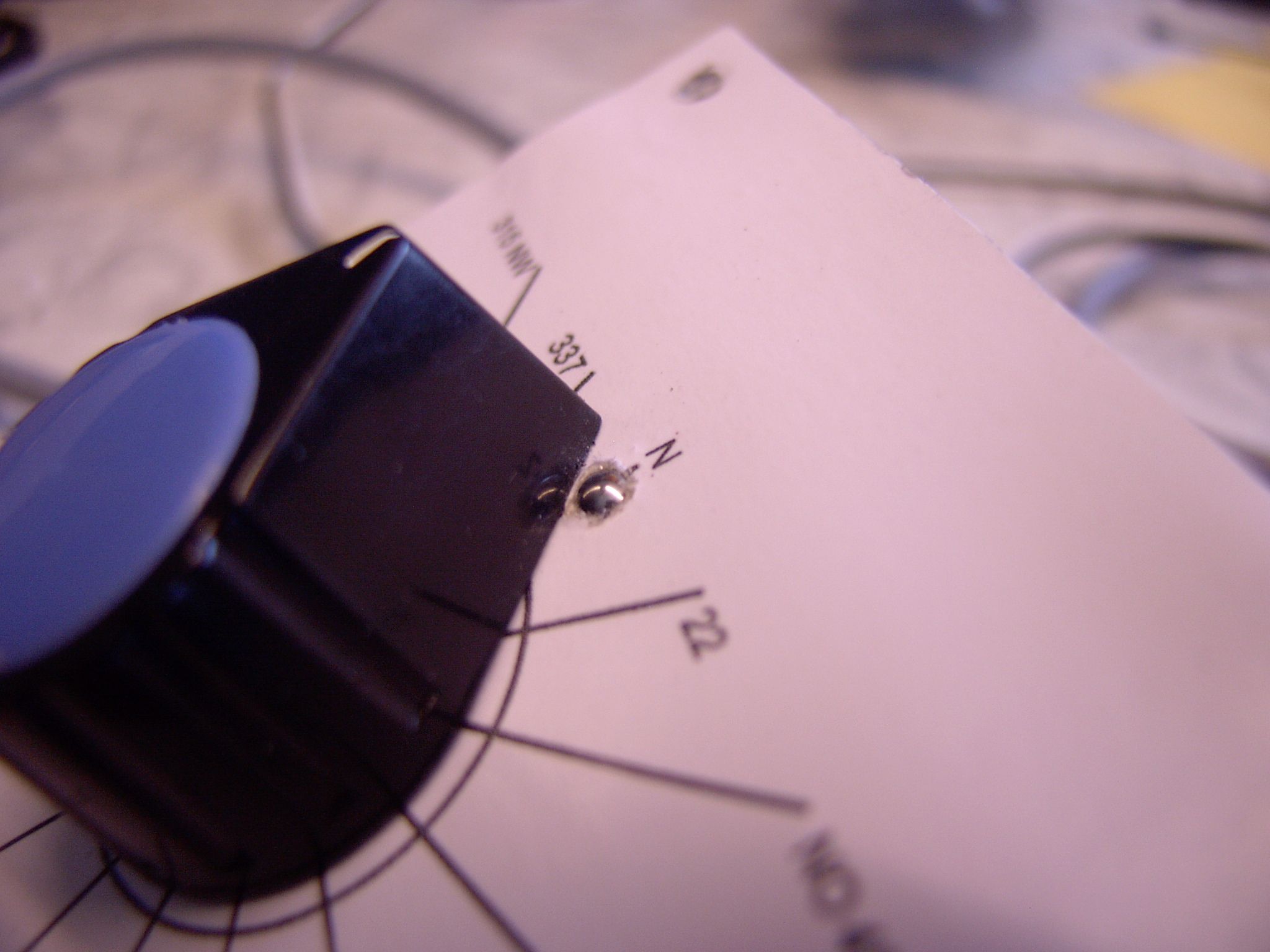
In der
Nordrichtung befindet sich als Anschlag eine gefederte Kugel
die das überdrehen verhindert, wenn es sein muss kann man trotzdem
auf die Kugel draufdrehn und genau nach Norden beamen
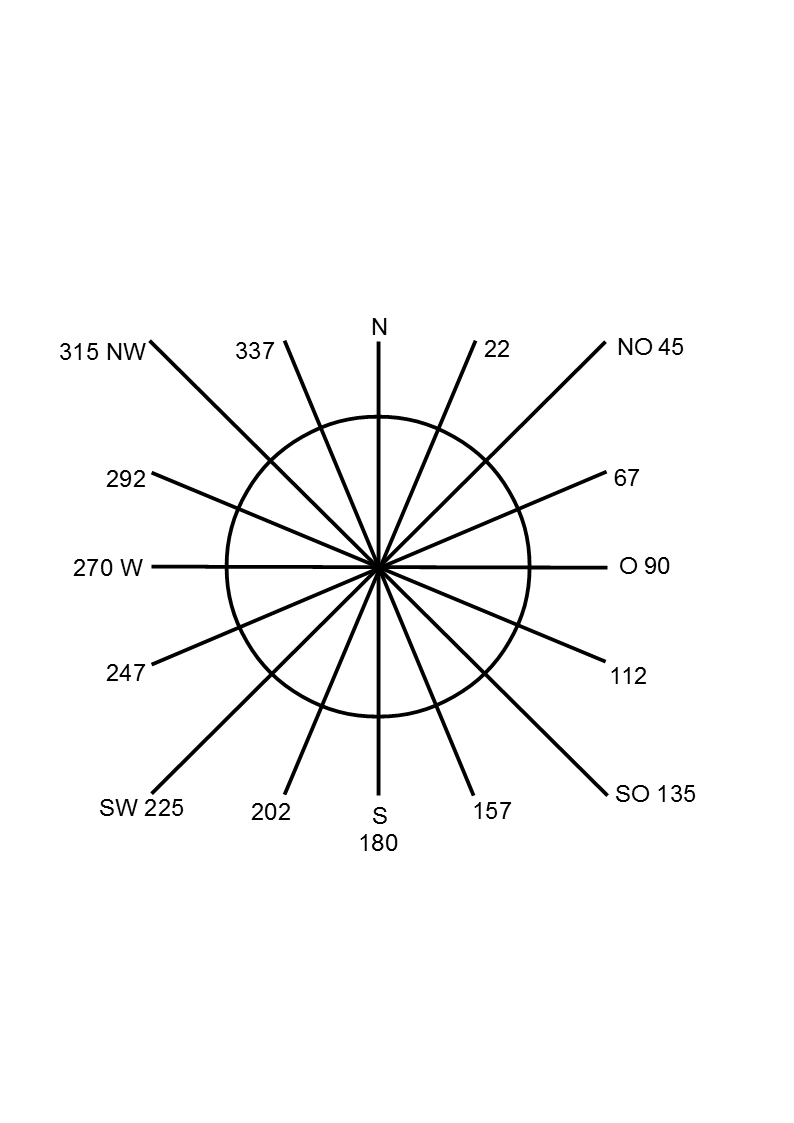
Hier mal eine selbst gezeichnete
Windrose
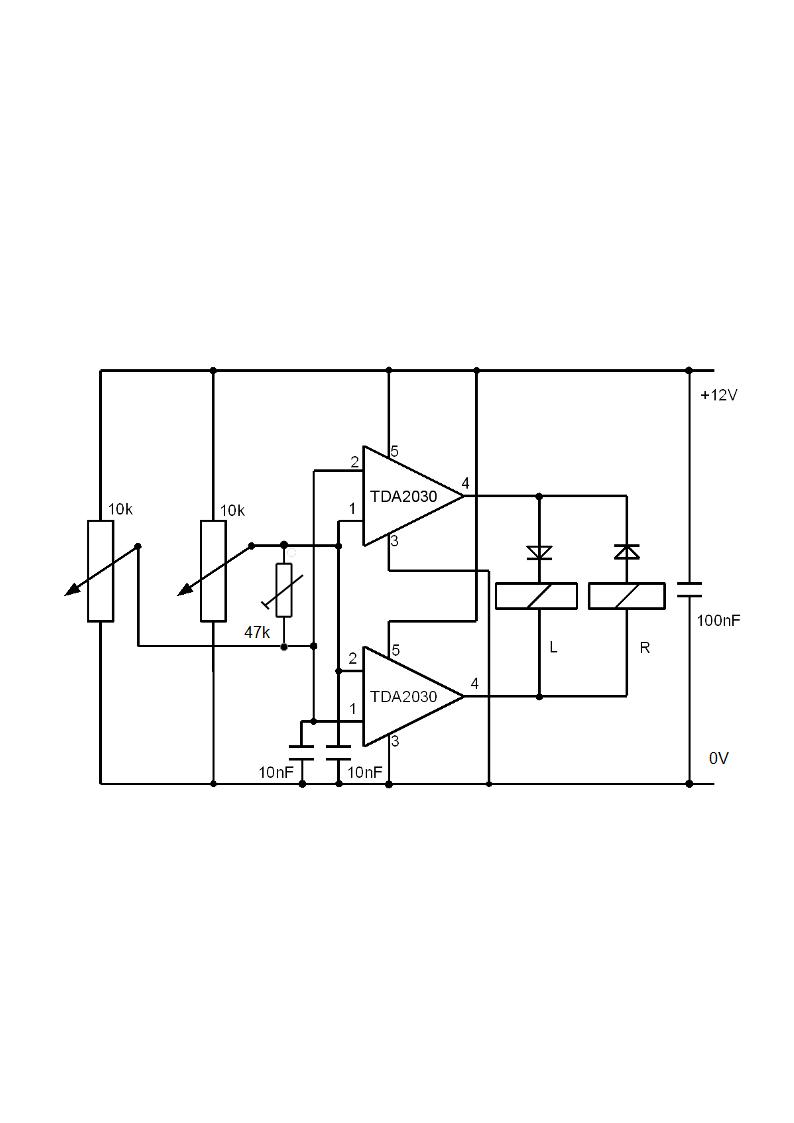
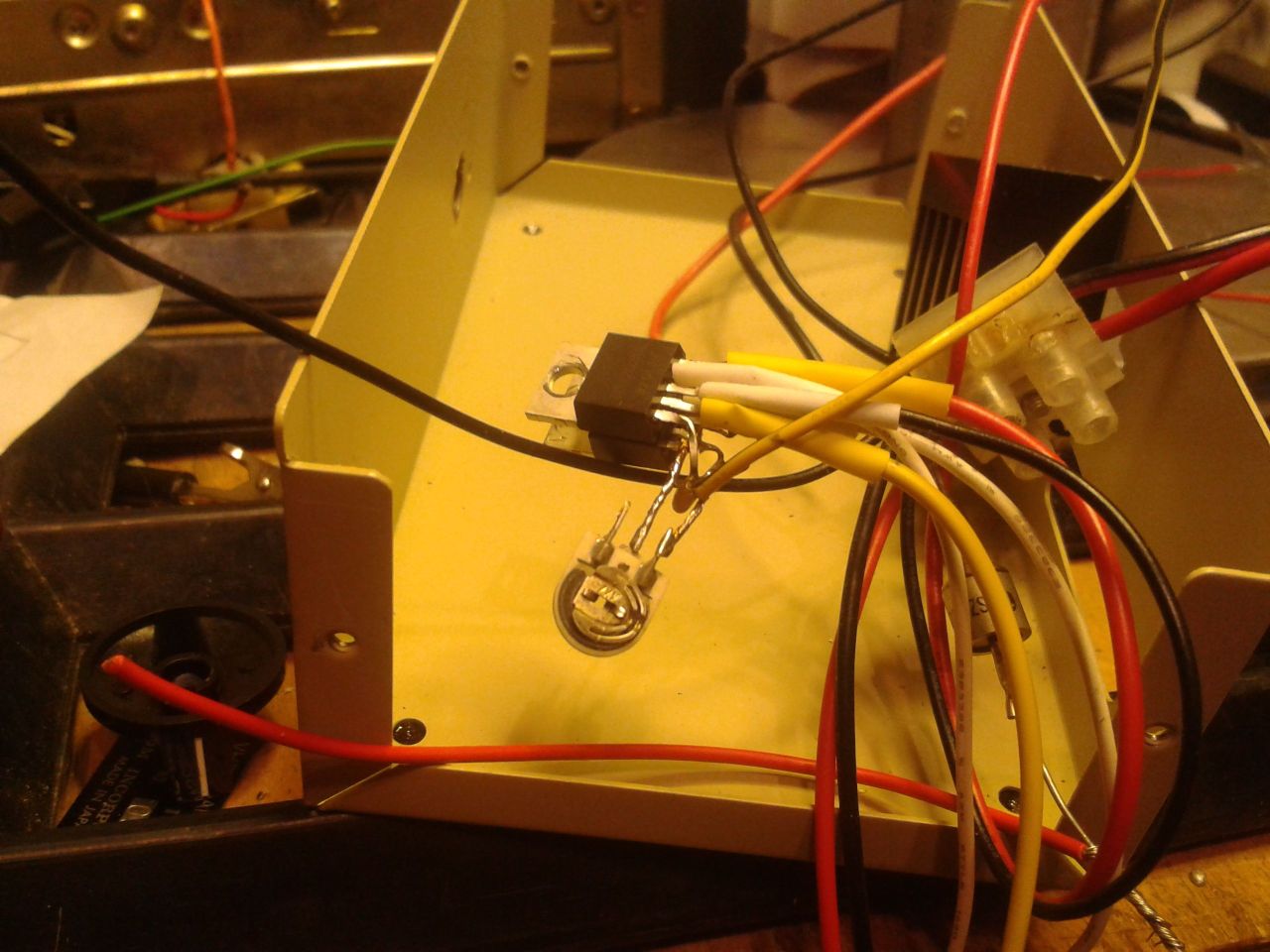
Hier
die beiden TDA 2030 in Freiluftverdrahtung ;-)
mit dem 4k7 Hysterese-Poti für die Positionierungsgenauigkeit
Viel Spass beim Bau de Reinhard DL5ZA ät WEB.DE