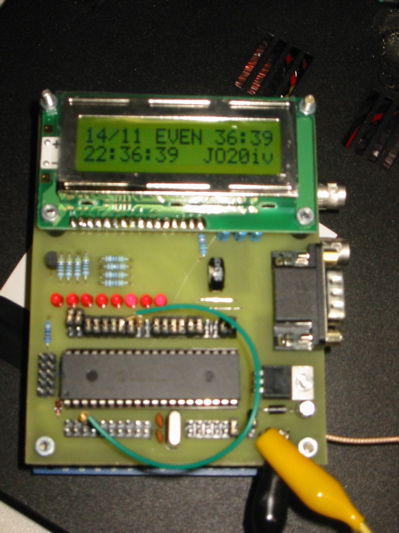
The Roverbox stack, LCD/PIC
module on top, GPS OEM board and 10Mhz reference
below - the two 10 MHz BNC outputs and GPS antenna pigtail are visible at the right.
below - the two 10 MHz BNC outputs and GPS antenna pigtail are visible at the right.



Alternating display mode.